| |
|
|
|
|
|
|
李飞飞团队具身智能新作:500美元,一切家务机器人帮你干 |
|
,通过自回归全身动作去噪和多模态观察注意力机制,WB-VIMA能帮助机器人有效学习协调的全身动作。 同时在训练和部署时,使用特定的优化器和噪声调度器,并在工作站上进行推理以实现低延迟控制。 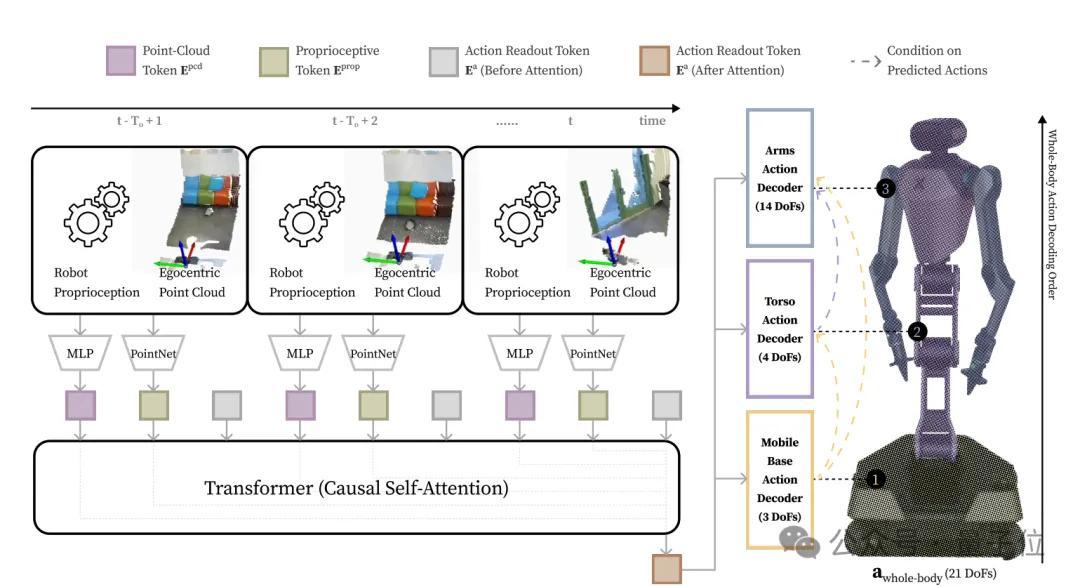 值得一提的是,WB-VIMA还解决了一个关键问题: 尤其在人形机器人中,在移动基座或躯干动作中出现的微小错误会在末端执行器处显著放大。 对此,WB-VIMA在预测下游组件动作时,不是孤立地进行,而是先分析上游组件当前的动作状态、位置等信息,将这些信息作为条件和依据,去推算下游组件应该做出怎样的动作,从而实现整体的协调运动。 BRS适用于各种家庭任务研究团队在五个具有代表性的家庭任务上评估BRS,包括清洁房屋、清洁厕所、倒垃圾、放置物品到架子上和晾晒衣服。 结果表明,BRS能完成多种家庭任务。 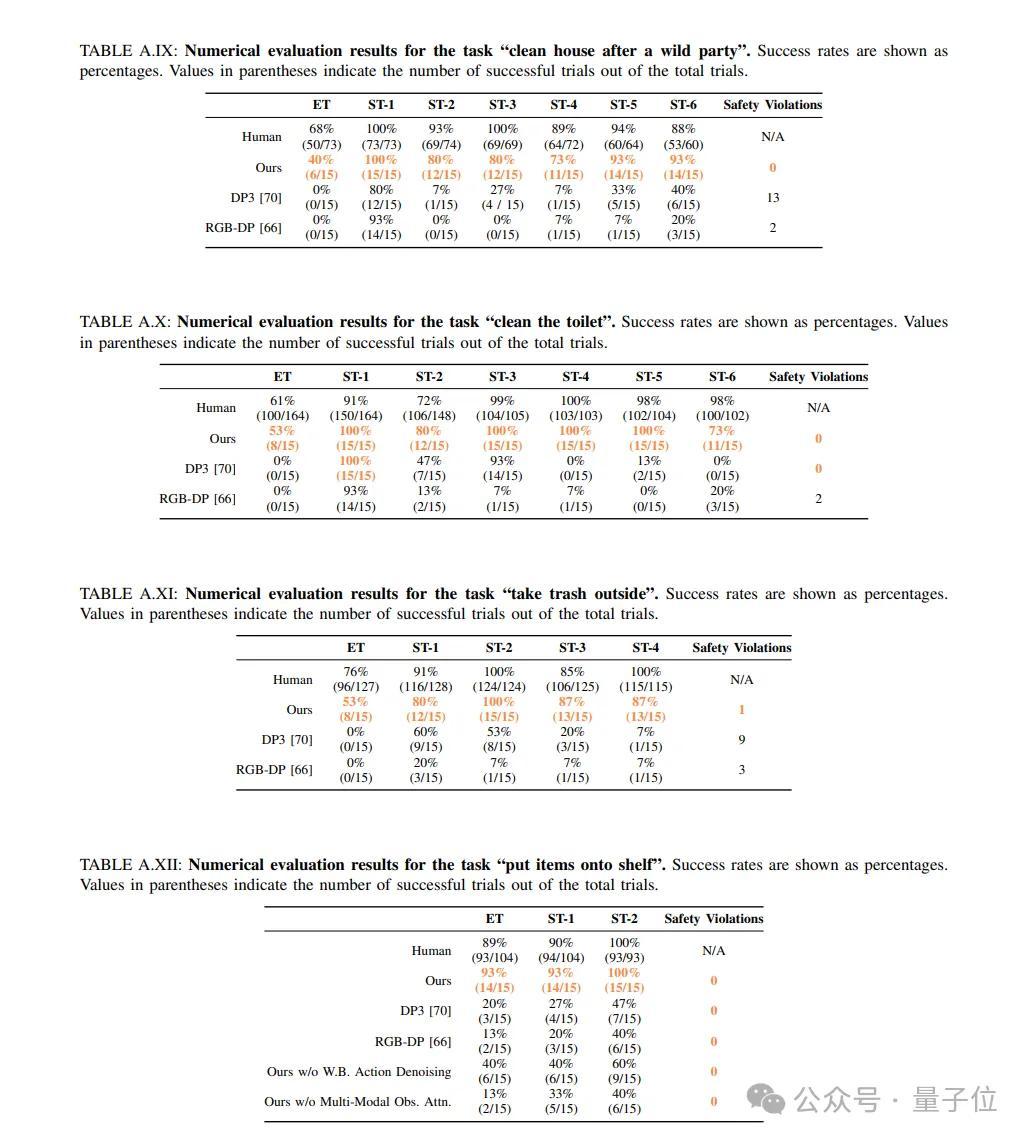 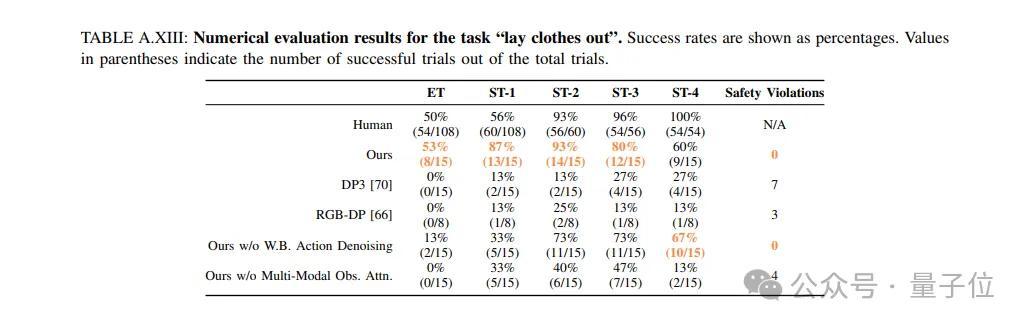 同时,实验环节还进一步验证了两个创新方法的有效性。 整体而言,JoyLo在数据收集效率、策略学习适用性和用户体验方面表现出色,WB-VIMA在性能上优于基线方法。 对于JoyLo,团队对10名参与者进行了全面的用户研究,以评估JoyLo的效果及其收集数据对策略学习的适用性。 下图为JoyLo与VR控制器和Apple Vision Pro进行比较的示意: 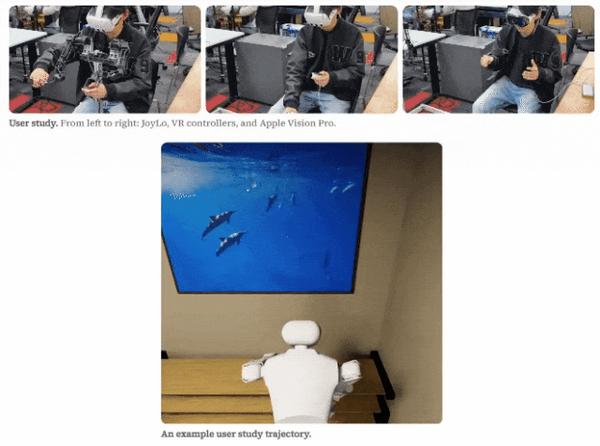 从结果来看,JoyLo在所有接口中表现出色,任务成功率最高、完成时间最短,其完成任务平均成功率是VR控制器的5倍,而使用Apple Vision Pro无人能完成全部任务。 且在用户研究中,所有参与者都认为JoyLo是最友好的界面。 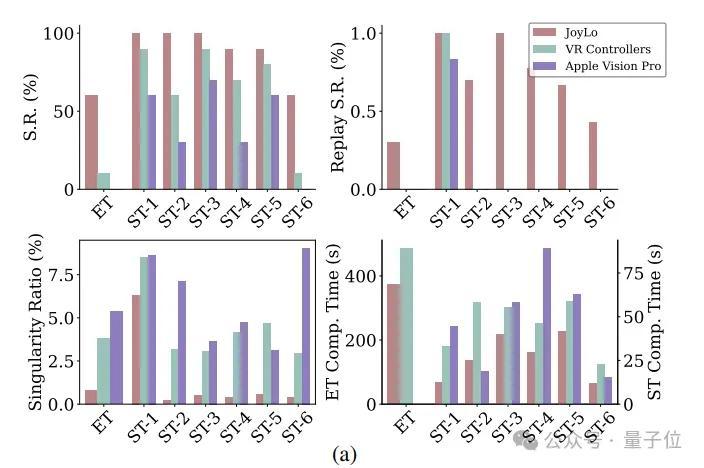 另外,WB-VIMA在所有任务中全面超越基准方法。 其端到端任务成功率比DP3高13倍,比RGB-DP高21倍;平均子任务表现分别优于DP3(1.6 倍)和RGB-DP(3.4 倍)。 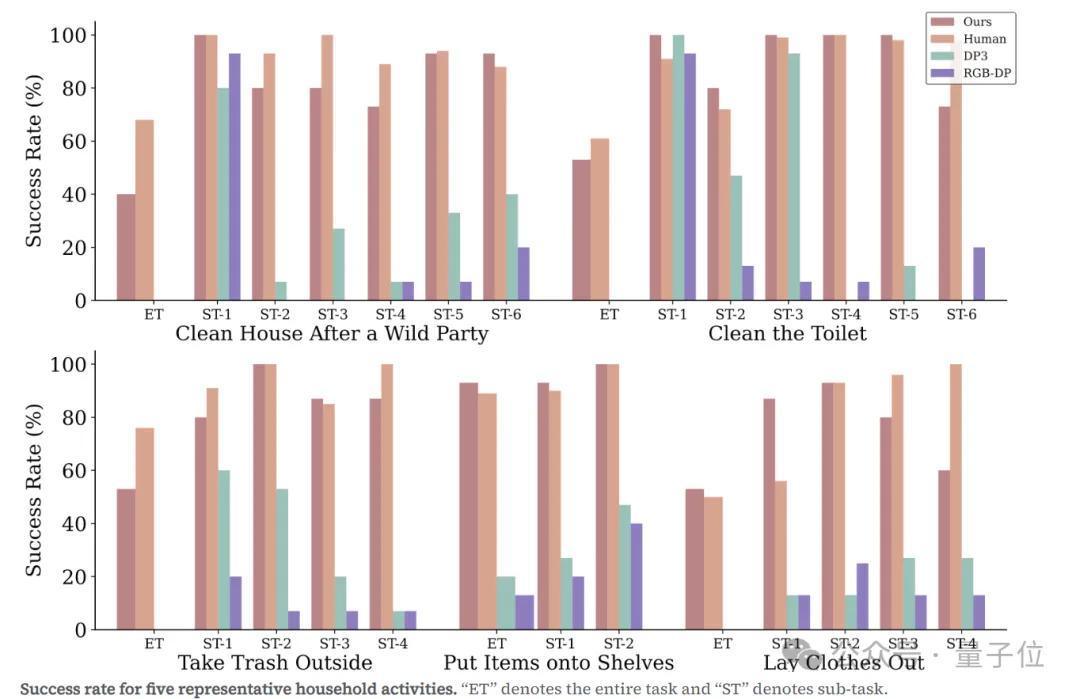 而且WB-VIMA在任务中出错的几率更小。它与环境物体的碰撞极少,且几乎不会因施加过度力量而导致电机失去动力。 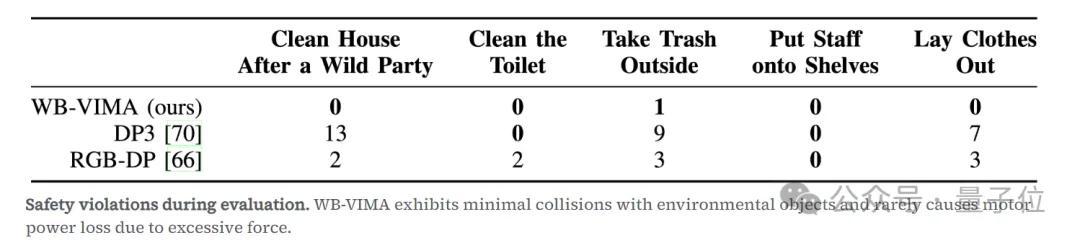 最后,关于BRS框架的所有工作已全部开源,感兴趣可以进一步了解。 项目主页: |
| https://zhuanlan.zhihu.com/p/29669676754 |
|