| |
|
|
| ֪ʶ�� -> ���� -> Ϊʲô����ֱ��������ͷ����һ���������������ӣ���С�����˻������ĸ������� -> �����Ķ� |
|
|
[����]Ϊʲô����ֱ��������ͷ����һ���������������ӣ���С�����˻������ĸ������� |
| [�ղر���] �����ر��ġ� |
|
�����͵IJ�ͬ�����˲�ͬ�������Ϊʲô������ֱ�����ܲ��ܲ�ȡ�������ͣ� |
|
��������һ��Ч�ʷdz��͵Ĺ��͡��ö�����̶�������������Ҫ����Ľ��ܡ� ��������������� CH-47���û���ȡ���˽��ܵ����á� ������������֮���̱�С�ˡ� �Ҳ��ɡ���Ҷ������Сһ�룬Ҫ�ﵽͬ�������������������������Ҫ���ı���˵���������������ˣ�������ֱ�ӵó�Ч�ʽ��͵�Ч�����ؼ��ǣ� ����Խ��Ч��Խ�ߣ���Ȼ���б�ЧӦ���������ߣ� |

|
|
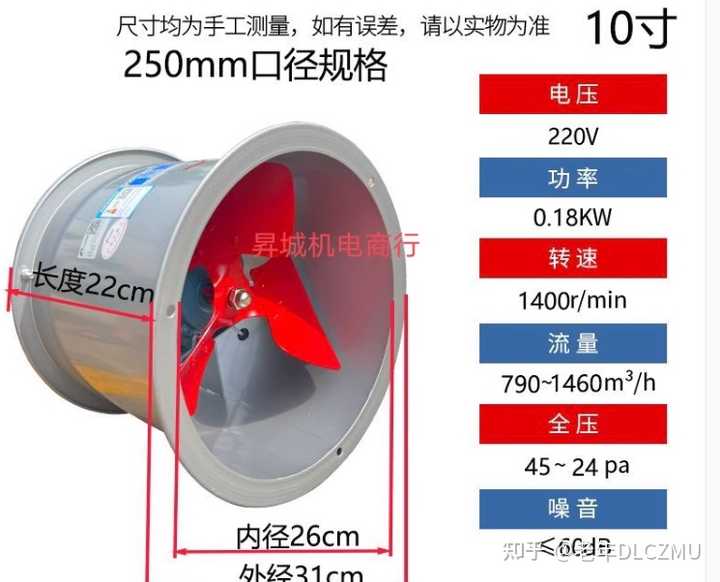
������������˷�����Ŀ��������������������ڿ������٣�������棩���������£�����Խ��������Խ�٣�����Ч��Խ�ߡ� �����Խ�ߡ� ���Դ�ɻ���Ч�ʱȷɻ��ߣ���Ϊ�������������������ķ��ȡ����֣�Ҳ�������������Դ�����С������Ч�ʸߣ������ִ��ɻ��ڷ������ɿ��Եõ����ϳ���������˫���ɻ�ȡ���ķ��ɻ�����Ȼ������ͬ������ͻ�����˫���������������������ΪҪ���ǵ���ʧЧ��������������ͺ���ȻС���ķ��ķ����� ����Խ��Ч��Խ�ߣ� ��Ϊ��ѹҲ�ã�����Ҳ�ã��Ǹ����棨����������˵�����ǽ�Ҷ�������ٶ��йء� ����ͬ��ת���£���ҶԽ������Ҷ�����ٶ�Խ�ߡ���Ȼ��߽�Ҷ���ٶȣ�Ҳ����������ת�٣��ܹ���߽�Ҷ�����ٶȣ�������������������ת�ٵ�ƽ�������ȡ� ͨ�Ľ������ڴ������↑55W��72����183���ף�����֮�������������з磨������1�����з磩��ʵ����������ɴ�500������/���ӡ� |

|
|
�����60W��18���̨��֮�������������������з硣 |

|
|
���ٸ���8��ķ��ȴ�֮�����оͼ���û���ˡ� |

|
|
ʵ������������180W��10�������ʽ���ȣ�������ԶԶС�ڵ��ȵġ� |
|
|
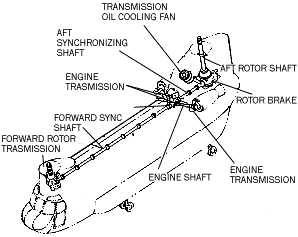
���������⣺ ����������Ϊ��ҪŤ����������ת�����������һ����Ť���û�����ת�����Ա���Ҫ��β�����������������ƽ�����Ť�أ�����ֱ��������������� ��ֱ���ṩ�����ĽǶ���˵��β�����Ĺ����DZ��˷ѵ��ˣ����⣬β����β��Ҳ���������������� ������߳ߴ��С��ֱ������˵������ѵ�������������������ȫ�����ˡ� β����ȱ���ڴ���ֱ�����������ˣ� ������ǰ��˵�ˣ�����Խ��Ч��Խ�ߡ� ������ͬ����������Ҫ��Ť�ؾ����ԽС����Ҫ������Ť��Ҳ����Ը�С����Ȼ��β�˵�ǿ��Ҳ���Ը�С�� ���ң���ͬ���������˻�������ֱ�������ٶȺܿ죬����Ŀ��������Ǹ��ܴ����⣬β������Ͱ�Σ�����һ���ݻ�������һ������ǰ���������������á� ���ԣ��ɻ����ˣ�β��������Ч������������û���ˡ� �������˻��ɿ����⣺ �������ɿ�̫�����ˣ�β����ˮƽ������Ť��ƽ�ⶼ�������� �����㾲̬��ͣ������ƽ�⣬ֱ�������ͬ�����ʱ�����������������ˣ�Ť��Ҳ���ˣ�β���������ֲ��ܵ���ˮƽ������Ť���ˡ������÷ɻ��ͻ�������һ��ת�����һ�������ť��ת�� д����̼����������ﶼ�Ǻ�����ֵĴ��� �������߹�˾�����ֱ������С���������˻�����ֻ��ȡ���ù���˫������������⣬��������������������������������������Ť�ظպ��Ƿ��ģ�ǡ���ܹ��������������ͬ�����ʱ��������������ͬ���������СŤ�أ��������������Ҳ��֮�������С�� ��������˹�Ŀ�52ֱ������һ���ġ� |

|
|
��Ȼ������52��ͬ�����ֹ���˫�������ֱ����Ҳ��β�������ǵ��������õġ� ��Ϊ�������С���������˻���ǰ�����ˣ���ͨ������ĸ���ʵ�ֵġ� ���ǣ��������ḩ��ֻ��ǰ�����ˣ���ת�䣬��ʱ�������β����תŤת��ͷ���Ӷ�ʵ��ת�䡣 ���ԣ���Ȼ���ֱ����Ҳ��β����ƽʱ�Dz�ת�ģ�ֻ��ת���ʱ���ת�������ܹ���ת��������ת��ת����ת��ת������Ϊ�ı�ֱ�������ת�����������-�ı������������ˡ� �������˻��Ĵ������⣺ ���ǹ���˫����������Ҫ���������Ը�ǰ��������һ����������ڵȵȽṹ�� ������Ϊ��Ϊ���˷�ת���֣����ᴫ���ṹ���ṹ���Ӳ�˵���ؼ�����Ч�ʺܵ͡� ��Ϊ��ͬ����������Ϊ�������ɱ��ȵ����أ���Щ��߷ɻ���������������������ֻ����ע�ܵ����ϼ�������������ע�ܼ���ע�ܳ��͵�ʱ������ˮ�ȵ����أ�����ԭʼ��������֤�� ���⣬Ҳ�������������Ǹ����⣩ ������Ϊ�ɱ����أ�������ĥ���ȵȶ��μӹ����ս��о��ӹ������´���Ч�ʷdz��͡� ���������������ƣ� ����С���������˻���˵�������������ǵ綯��ֱ����û���κδ�������������Ч�ʺܸߡ� ���⣬���ĸ�������Ť�ػ������������ֻҪͬ�������ĸ��綯�������������ڵ�������Ӳ����˵�����ף�����û�����������⡣ ���⣬���������˻�û����Ҫ���������ᣬ�ù�������ͬ������������ֵ���������������Բ����ṹ���ɿ�Ҳ�ܺ����� �������������ڴ���ֱ�����ϲ����ڣ� ����ֱ������������һ�����ӵĶ������������۵�������˫��������Ҫ�г����䣬���б���������Ҫ�п��Ը��������ᡣ �������Ľṹ����������ڴ���ֱ������˵�����¡� ���⣬��Ϊ����ֱ�����ij��ֵȵ��ǽ�����ģ��о��ӹ��������б�֤�� ���⣬���Բ��ø��ӵ���ϵͳ���������ڴ���ֱ���������������⣬�� ������ֱ���������˼�ʻ�ģ����ڱ����ݸ˵IJ��ݡ�ת�ٵ��������Ƿ�������ֱ���ģ�û�зɿ����⣨��Ϊ����Ա�����Ը��ӳ̶�ԶԶ�������˻��Ŀ��������� ���⣬��Ϊ����ֱ�����ɱ����С���������˻��Գɱ������У����Թ����ø��õ�����ר�õ�Ӳ������ʦ���Ի��ܶྫ��ȥд�ɿ������� ����Ǻ�ģֱ�����ɿ������бȽ��Ѵ�����һ���㡣 ���ǣ��������Ǵ���ֱ�����ɿطdz�����ļ����� ���ڱ����ݸ�װ�ڼ�ʻԱ��λ��ǰ�������Զ���б���ڻ������������ڱ����ݸ�����η����Զ���б�����ڻ�������η����Զ���б����ÿƬ��Ҷ�ı���������ӣ���Ҷ���ǵĸı�������б�̵ĸ߶ȸı䣬������ƽ�治�ı�������ʹԲ����ÿ����Ҷ��������ͬ����������������������Ҳָ����һ����������Ĵ�ֱ����Ϊֱ�����ṩ������ˮƽ�����ķ���;�����ֱ�����ķ��з��Ӷ����Բ���ֱ������ǰ�������Ҹ���������С� ����Ȼ���ҵ�֪ʶ�ȽϹ�ʱ��������ͬ�����˵������˵������������˵���������ģ� [1] �ο�^https://mp.weixin.qq.com/s?__biz=MzA5NDkwOTkwNQ==&mid=2651094472&idx=1&sn=83aef3e5abb342400c01e7ee160ae52b&chksm=8bb7b976bcc03060a73d48184cc19f0316227a151c9fb6bf3b35e756a25a0b85c3129d60369d&scene=27 |
|
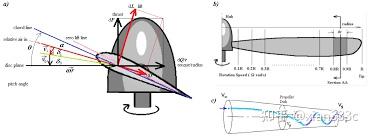
���̵���Ч�ʸ��ߡ� ������Ч�� ��=J��(Ct/Cp) �任һ�£����������������ʱȺ� Ct/Cp=��/J �����ȡ�Ҳ����ǰ����Խ����ЧԽ�ߡ� ǰ�����ǣ���ֱ��Ƭ��������ٶȺͽ�Ҷֱ����ת�ٵıȡ����Ƕ���ֱ�����������֣���Ҫ�������ٶ�����������������Ҷ�Ὣ���������Ʋ�����������Ե���Ҳ�������ֱ�ڽ��̵��ٶȡ� �ģ������� F=mv �ƶ�������Խ�ࣨ����������Խ����ͬ�����µ��ٶ�ԽС����������Ҫ����Ľ��̣��ƶ��������塣 |
|
|
������������һ������������ٶ�Ϊ0�£���������Ť����ȫ�������ṩ����Ҷ��������ȫ��������������ٶ�Խ��Ť�ػ�Խ��Խ����������ķ����ṩ���γ��˸��ٷ�����������������Ч���ݡ� �����������ڵ��ٻ�������һ���Ч�ʱ��ݡ��ڵ����£����̵Ĺ��ʾ��������ڽ�Ҷ���������������Լķֽ�Ϊ�����������������������յ�����������������ֱ���÷������Ľ��ۣ�չ�ұ�Խ�ߵĻ����յ�����ԽС��������������˵���ǽ�ҶԽϸ�����յ�����ԽС�� Ȼ����͵õ���ֱ�����Ľ�Ҷ�ˡ�����+ϸ���Ľ�Ҷ���е�ʱ��ʹ������С����һ�������յ������� ���ﻹ��һ��Ч�ʵļ����ؼ���һ���ǽ���Խ��Ч�ʵ������������ƶ���������������ͬʱ����û��̫���������������������Ҫ��ͬ���������������̵�Ч�ʻᱻ�ٶ���������ȥ�� �����Ľ��̻�Ҫ����Ч�ʻᱻ����ƿ�������������Ϊ�����Լ��ļ�������һ��������0�����Բ�����������ѹ�ʽ��J��0�ƽ�����Ч������������������� |
|
��������һ��Ч�ʷdz��͵Ĺ��� �ӽ����غ���˵����Ҷ������Сһ�룬Ҫ�ﵽͬ�������������������������Ҫ���ı��� |

|
|
����ռ��ƽ����������һ�������Ŀ��ȣ���Ҫ�����ĸ����۵Ľṹ������Ҫ˵չ���ˣ�ͼʲô�ء� |
|
����ֱ�����������ᣬ����Ч�ϻ������� ����Ψһ�������ǽṹ�������ɱ��ͣ������Բ�����ƿ��㷨�ֲ�����Ч�͵����ƿ��ߴ�С��Ū��ȥ�� ���ͻ��ijߴ���������ṹ�������Ʋ����ԡ����ͻ���Ҫ��������ȣ�������û������ģ���Ҫ����Ļ�Ҫ�����������˫��İ��ᣬ����Ч���ˡ� |
|
��Ϊ���ܲ�������ķ���ģʽ�� �����������ܼ��ᣬ���еķ��ж���ȫ��������ת����ʵ�֣����¾�ֹ��ͣ��Ҳ��Ϊ�˱������ȵĸ�Ƶ������ û��ѵ������ͦ���˶�þ��ܸ���Ū���ˣ���ˮƽѵ�������ˣ�Ҳ�ܱ��Ǹ�Ƶ������������� ���������������˶�����źӵ�ʯͷ����ȫ�����ݾ���������£���Ŀ��Ȼ������ȡ���ˡ� |

|
|
���������㿴���ٹ�˾��չ�˶������ˣ������Ƿɲ�������ǡǡ�෴�����Ƕ��ɵ��������ɻ�״̬ҲԽ��Խ�ã�Ȼ��ǰ���������ⲻ����������ǻ�����Ǻ��ѷ�չ���г��ġ� |
|
��Ϊ������Խ������Ч��Խ�ߡ� ֱ�������ڹ��رȺܲ�Ļ���������ʱ���з��ģ��Ƽ���һֱ������Ч�ʷŵ���λ����ΪЧ�ʵ�һ��ͷɲ������ˡ������һ���������������ĸ�С������������Ч�ʻ��ܶࡣ ���˻��ǹ��رȳ�ǿ�ĵ��ʱ����ʼ�з��ģ�����Ч�ʵ��ߣ��˷�һ�㹦��û��ϵ����������ᡣ �ٸ����ӣ�ǰһ�����ԡ�������Ϊ��������˻����������������ģ�������Ϊ������Ч�ʸ����������� |
|
�ĸ������൱�� ����Ӳ�̵�4���� raid0���ٶ�����ˣ����ǻ�һ�����군�� |
|
�ܼ�����С��Ч�ʵ͡� �������ܣ���Ҷ���ȥ��������С�ͻ�û�������� ������ͻ�һ�㶼Ҫ���ˣ����������ַɷ�����û�������ˡ� �ö��˶���˺�������������飬����º͵�������û���κι�ϵ��ֻ����ϣ���Ļ����С������������������й�ϵ�� ���ⵥ������Ҽǵü�ʹ���������ˣ�ֻҪ�ỹ��ת�����ܰ�ȫ��ء�������Ǿ����ó�����ص����ɡ� |
|
��Ϊ���·����ѣ���չ���ͣ�ֱ���������ܶࡣ ��ʱ����˵��ֱ�����������������ӵΣ�������������������һ����Ҳ���������������������� �����������ģ� һ��K-MAXֱ�������㿴������������������������Ŷ�� |

|
|
����������ӥֱ��������������������һ���������� ������Ӱ�����ν�ա��������Ƕ���ӥ����һ���dz��õĹ�档 |

|
|
�����������ǣ�����˹K-52����ֱ��������̹��̹������ܣ��Ҿ���һ�ڡ��� |

|
|
�ġ�CH-47֧ū�ɣ����д���ʿ������һ�������� |

|
|
������������ һ���������������������������ˣ��տ����С�������-32�� ����ʱ�ڣ����ӵ���ƣ���������ʱ����֮���Ȼ�ɱ�Ҳ�ǡ����ź�����û���������÷ɻ���������������Բ���ʱ������ƻã� |

|
|
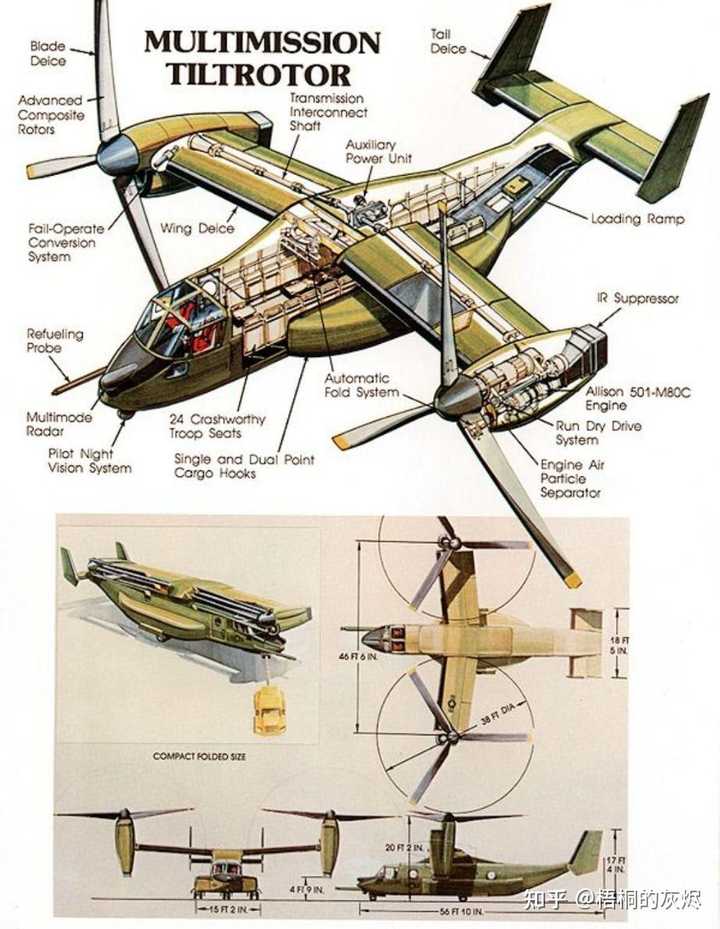
�ĸ��������� һ���ܵ�˹-���ع�˾���չ�֮����-X-19�������ɻ���Ū������ɻ���˾�͵����ˡ� |

|
|
�����������Ĵ����V-44�ķ���ת�����������ӱ�ʾ���㸺�������������ӡ� |

|
|
Ϊʲôһ���������ķɻ����ء���Ϊ������Լ�����װ���У���ʵ���Ǻ���Ҫ�ġ�����ζ�Ų����׳���������ζ��ά��������ɣ��Ժ��ڵ�ѹ���Ƚ�С�� �����Ϊ�أ� |
|
Ϊ�������˻������ż��ͣ�ֻ����������߹��ᷴ�� ȱ������ܺıȼ��� �������������˻��������ѳ���30���� ��ֱ������һ����ֱ�����������Ǻ���Ҫ��һ������ ֱ�Ӿ��������ʹ�ð뾶 |
|
Ҳ�в��ǵ� |

|
|
|
|
�����м���ٹ��V���˻��ģ�Ӧ����ũҩ�������б��˫������е���������Ͷ����� ������������վ���������650�������350�������2-4Сʱ������6500�ס� ��綯��������ɶ������ƴ���غ������� |

|
|
|
|
��̫�����ˣ���˵��������������������Ǵ���vr ����һ�����˻��ģ�������˶�����ѣ�θ� |
|
���X���ǰ�ȫ��Ү �d�˵�ֱ�N�C��Ҫ���^�ߵİ�ȫ���� ������Ѿ�һ���R�_ʧЧ�͙C�������ˣ���һ���������Ѿ�߀�ЙC���������䣬���߿v��ʽ����Ѿ��܉��چ�����ʧЧ�rһ�w���湩���ɂ��������Ą��������������C��Ҫ��˵İ�ȫ���࣬���ӵęCе�����c�ɿ����½����ܕ����N���������ĺ�̎�����ԉĵ������ܣ���������������С�͟o�˙C�������@�ӵāѾ֡� ��ֻ�ǘI�N�ۺ��ߣ��ṩ�ҵ��^�c�o�ㅢ���¡� |
|
���������˻� ��λ����Ļ�������ը�����������߿�������ը���� ������ʸ����˾���ȫ�������ܵġ� |
|
��������Ч���˶�˵�ˣ��Ҳ���һ�� �Ǿ��������������õ磬Ҳֻ���õ硣���ԾͿ������ĺ�С��Ҳֻ����С�� ���Ѽ�����������������ռ�����Ҫ���ǵ����ڷɿؼ����ͼ��ɵ�·�Լ���ء�����ķ�չ�� ����������С�����ƴ�ֱ�����̶���Ҳ�������ĺ�С�����Ƕ����õ硣 ����ȼ����������������ôС�ģ�������������Ҫ���ĸ���Ҷ�ֱ���ƣ�Ҫ�ֱ�ȷ����ת�٣���Ҳֻ�е��������������ȼ���������ϼ��临�ӵı��ٽṹ�������������Ҳ�����������ƾ��ȵĿ��ơ����Զ�����ֻ���õ���� �����Ե�Ϊ�������͵ÿ��ǵ�ص������ܶȣ��ֽ�﮵�ص������ܶ�ԶԶ��������ȼ����ȣ������д��ͷɻ���ĿǰҲ�����д���ģ���ȻҲ�Ͳ����ж������� ż����Щ��˾�������˶���������������������ڴ�ͳ�ɻ�����Ȼ�Ƕ̰塣 ���ԣ�Ŀǰ���ͷɻ�����ȼ������Ҫ�ù̶�����ֱ������ ��С�����˻��ô��磬��Ҫ�ö������� ��Ȼ�з�����ֻ���Լ۱���ȷʵ�����ʡ� |
|
��ȫ����Ч�������ϵ����⣬�����ش�˵�ˣ�����˵���㷨�����⡣ ���ǵ��̵߳ģ������Բ����ܸ��ӵĶ��������ҿ��Բ����ú�ϸ�壬�������һ��������ë����дһ�ֺ��֡��������������ʺ��ø��ϵ���άָ��������һ�������������ⷽ���ǿ���������˾��Զ���С�Խӹ��ˣ�ֱ�����������������죬Ҳ�����˻���һ�ˡ� �˲���ֱ������ָ�������ڣ� ��������㷨���¶��̣߳�ֻ�²�����ϡ������ۺϾ��ߵ�����������ת�١���ֱ�ǶȺ���ת�Ƕ�֮��Ĺ�ϵ����Ȼ������N�����������м�ת�ٵ���������ɡ� ������������˻���ָ�������ڣ� ����ָ�����д�ɿس���ij���Ա�������Ѻõģ������ٵ��ܶ�ͷ�������ɻ����Ʋ�����ʱ����ֻ��Ҫ����4����������ת���㷨���������������迼�����硸�ҵ�����ͨ�����ת�ٻ���ͨ�������������ø���ij����������������ʽ�����⡣ PS���Ҳ�̫��ֱ���������˻��ľ���ԭ��������ϸ�ڿ�������Ӧ�ò���Ӱ����ۡ� |
|
��ϲ���㷢����UAV��drone������ |
|
����ṹ������С����е�ṹ̫���ӣ���һ�����ȹ���·��һ������˺�һ���� �������ɿؼ�ת�ٴ�0������ò���1�룬��ȫ�Ըߡ���е�ṹ�����Ųȵ��ף�����������������ת��Ҳ��Ǻ�������������ʱ���Ѿ��㹻�ɻ���̬�������츲�صı仯�� |
|
��ΪС���˻����������� ֮ǰ�����ĸ����������Ͷ�������Ȼ��Ϩ��ģ�û��������Ӹ���������鲻������-��= ���Ͻ�Ҷ��С��Ҳ���ף������һ�����Ƚ��� ����ֱ���������ỹ��ͦ������ �����ϱȽ����� ��Ϊ������ת�ٺܸߣ�����ֱ��������Ҷ��һ�������һ����������������ۣ���Ƚ��鷳 |
|
����Ҫ����Ч�ʵͣ������̣�ǰ�����˵���ˣ����dz����ģ� ������ֱ��������������ؼ��Ľṹ������б�̣���б�̵��������ý�Ҷʵ�����ڱ�࣬Ҳ���������Եظı�ͬһ����Ҷ�Ľ��ࣨ��������Ϊ��б�̶ȣ���һ���Ƕȷ�Χ�ڣ�����Խ��������Խ�� |

|
|
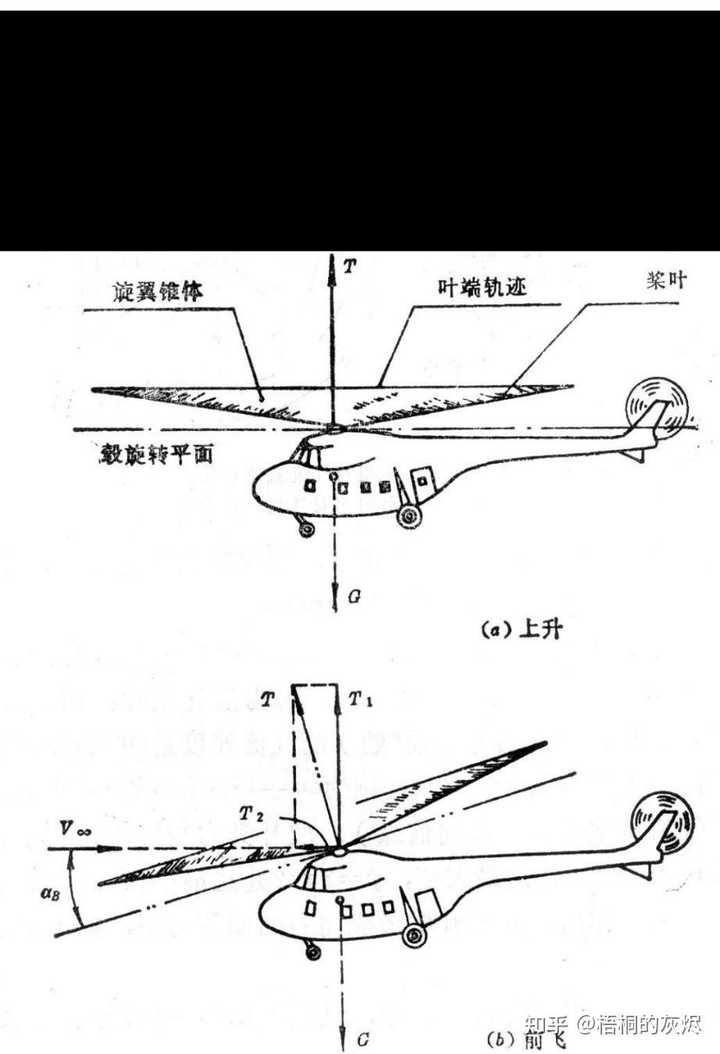
��ô���������ֱ����ǰ����ͨ����б�̽Ƕȵĸı䣬��ÿһ����Ҷת��ǰ����ʱ��Ƕ�С��ת����ʱ��Ƕȴ���ô�����������������ǰ����������ǰ��б���Ӷ����ý���������ǰ�ķ�����ǰ���У�����������У��������ͽ���ת�ٱ仯���� С�����˻�������û����б�̣������ǹ̶��ģ������ǵ����ȷ����ÿ�������ת�ٴӶ�����ÿ�����̵��������ı������̬ʵ���ȶ������ƶ�������ͷ������̨�ϱ��ⶶ���� ���������ṹ�Ŵ����˳߶ȣ����ȴ����������������Դ�Ҳ�ͺ������ı�ת�٣����͵ķ�����Ҳû�е��������ӦѸ�٣���ͬ�����µ�ص�������������������Ķࡣ�����ÿ������������б�̣���Ȼ���ԣ�������Ἣ������������ɱ����ṹ���Ӷȣ������ʺ͵�����ֵĺ������� ͬʱ���ִ�����ֱ������Ҫʹ�õ������ᷢ������������ͨ�������������������������ɶ���Ļ���һ��������Ҫ�ֳ����״���ϵͳ��ͬ��Ҳ���������ĸ��Ӷ����⣻ �ٴΣ������˻�����ͷ���ɼ�ʻ�գ���ô���������̨�ἫΪ���أ�����Ǿ�������̨�����ٰ�һ��������ϸ����ص�û�ߣ��ɱ�Ҳ��ߵ����ˣ�����Ҳ������ʹ�û�е������������õ紫�ɿأ��紫�ɿ���ս�������Ǹ��ö��������ŵ�ֱ���������ڵͿշ�����������ǹ�Ķ����ϣ���һ���ij�����ߣ��㶼����Ӳ�����ݸ������Ʒɻ��� ���������أ���Ҫ���dzɱ��Ϳɿ��ԣ��Ĺ�ͬ����֮�£���������Ȼ������ֱ���������Ž⣬��������֧ū������ǰ��˫�������߿�-52���ᷴ������������Ƶ�ʱ����뿼���������������������ֱ����ײ�����⣬�Ѿ����ά������ܴ�Ŀ��飬��������ߵ���ÿ��ֱ����Ҫά���ĸ���б�̣�����һ���״����ṹ�������ڿ��·ַ��Ӿ�Ҫ�����ʦ�����װ������������е��ʺ��ˡ� |
|
������X2 |

|
|
С�����˻� |

|
|
|

|
|
�������˻��Ļ������Ч��̫���ˣ�������Ҫ�DZ����ź���+���ż����������ˡ� �̶�����������ܷ�1��Сʱ��С��ʮ����ľ��룬���dz��Ӿ����+�������Ѷȡ�ֱ���������������Ѷȣ���ԭ����˵��ֱ�����еĶ������ǿ��������ı���б����ɵģ����������Կ���ֱ�����ŷɡ� ������������С�ͻ������ü�ֵ�͡������ԭ����Լ����ҷɵ��ȣ�������ͣ���ʺϹ��ڸ����豸diy�� |
|
��������˵�ˣ�ֱ�����������������˻��IJ���ͬһ��������ֱ��������������һ����ʹ���ڸ�����תʱ���Ըı�ӭ�ǣ�ʹ�����������⣬�Ӷ��������ֶ��������ַ������ʺ����С������ɱ��͵����˻�����С�˽ṹ̫���ܲ��ɿ������Ҳٿ���Ӧ�������˻���4��С�������������ҿ������������Ķ��� |
|
��Ϊ��ͳ���ᷢ������е����ʵ��̫���ѡ� ���ƵĴ𰸡� ΪʲôĿǰС�����˻������ĸ�������ܲ�����������?2 ��ͬ �� 0 ���ۻش� |

|
|
Զ���ǵ������+��������̬����+����������ܱȵġ� ����������������Ķ���̫�ѿ����ˡ� ����Ϊֹ��ֻ��Ch 47 Ψһһ������˫������ |
|
|
֧ū�ɵļ������ڱ������ϣ�ë�ӵ�����ſ�24��֧ū����Ķࡣ�������� |

|
|
�ſ�24 V22 ��ӥ�Ǹ���һ�����ᷢ������ϱ������ |
|
|
V22�Ǹ����������з������� ���������ս����Ҳû���Ͷ����������������������ԭ�����������ض�� |
|
|
������ֱ��������ԭ�� |

|
|
���ƽ�Ҷ�ĸ��ӽṹ |

|
|
���������Ŀ��Ʒ����Ķ� |
|
��˵ֱ��������ƶ���Ψһ�����ƾ����ܴ�ֱ���������Ĺ�Ч��������¡�����˵���ܷ��������Ѿ������˾ųɵĹ����ˡ����д����ܸ�˵���²� |
|
����ֱ�����зɿأ�С�����˻�û�зɿء� ��Ȼ��˵С�����˻�����ȫ���ĸ������ģ�С�����˻�Ҳ�е���Ƶģ�����ֱ��������Ҳ�����������ģ�����ɢ�� ���� С�����˻����������������ǽ���ɿ�����ȱʧ��һ����Э������ ����ѧ���ĸ�֧�ŵ�����ƽ�⣬��һ��֧�ŵ㣬̫����ɿ��ˡ� Ҫ�������Ҹ������ȵĵ��������������Ҹ�һ���ȵĵ����������� ���� ��ʵ����ǰ�����˻�Ҳ��һ�������� ���ǣ��������� �����ٹ��������˻��������ǣ���Ԧ��ס���ֵ������˻� Ȱ�������������û� |
|
��˵����Ҫ����ΪС���˻����ǵ綯����ֱ�������Ǹ���ȼ�ͷ������� �����������ڷ��п����������ƣ������������ڶ���Ч���������ơ� С���������˻����ǵ綯�����������С��Ȼ��û��������һ������������������Ǵ���������������Я�����صĵ�أ�ֻ���ø���ȼ�ͷ�������ȼ�ͷ������Ŀ��Ƹ��ӵĶ࣬���������ӵ����죬��������ԽС������Ч��Խ�͡������д���ֱ����װ�������������� С�ɻ�������Ҫ��ͣ��˷�����Ҫ�Ķ࣬���Բ��ö���������������� ֱ������ʻ��ʵ�dz��鷳������˳ʱ��ת����������һ����ʱ��ķ�����������Ҫ��β����������������ƫת�����Լ�ʻֱ�����ñȵ�һ��������ƫ�����г���Ҫʱ�̺ͳ��ӽϾ���һ������������ԭ��ת��Ȧ���ˡ� �����ֱ����ȡˮʱ����2������������2���Ѿ���-���������� https://b23.tv/4TmemWq ���Լ����DZ����˻���С�����ֱ�������ձ鶼�ǹ���˫�������������ƫת������Ϊʱ�̸��ɻ��Ͼ�̫�鷳�ˡ� |

|
|
���һ�ѣ��ܷ����������ֱ���������ڴ���ֱ�����ϲ�������˫������ ������������������ߵĶ࣬����ʧ�ء� |
|
���������ֶ�����ʵ�Ǻ�ì�ܵ���ơ�����������ر��ȶ������Ҳ���ֱ�ۣ�ȷʵ��������Ҫ��ȫ������һ�е�ǰ���Ƿɿ������������������ñ��߸�˿������һֱ����ƽ�⣬���ҵ������̶���˲����£����Ծ��ֹ��������ɿأ������Dz�������ɵġ� ����һ���ɿس�������군�����˻�Ȧ����������̫���ˡ�Ϊʲô��ʱ������û�±������˻��棬����˵�����IJ��ã����´����������Ҳһ����̫������ؿ��Ե����˺��¹ʡ������ǹ�����Ҫ���е�λ�еף�������һ��С�������Ҳû�¡� �ܶ���Ϊʲô�����÷�������������˵����������ģ����ǵ��İ�ȫ���⡣��������ĿǰΨһ����������ķ�ʽ�����������ķ��������Ի��裬����ֱ�������ٻ������������䣬�������ͱ����ˣ�����һ��ש���Ȳ�˵�ɿ����������������⣬���ǻ��������������ܶ�����������ġ�ͣ�����ԡ����ǹرնԽ��ߵ�����������ת��������ڶ��������Ť����Ȼƽ�⣬��Ȼû���⡣Ҫ�ǹر�ͬһ����أ����Ҽ�Ȼ��λ�����������и߶������ͼ��ף�����������������ɡ�� ����˵�ܶ�ս�����Ǿ����ȶ��ġ�ս����Ϊ������ԣ�û�취��ֻ����������������Ҳ���˵������Σ�ʵ�ڲ��о���ɡ�ɣ��������õ���ô�������ϵ��������أ������û��ѵ������ ���о��Ƕ��������ǿ���ض��ǿ�ת�ٵ��������ġ����˻���������С������ת������С�������������ף���������٣�ά�������Ƿ������ٴ��Ļ��Ͳ����ˣ���������Ҫ������ȼ���Ǹ����У��������Ȳ�������������ɱ�ص����ֱ临���ˣ�������ֱ���������Ժܶ�����������ǵ綯�ģ���Ϊ���������ԡ���Ҳ����������ʱ�䡣 ��ʵ�����ʱ����ֹ���������ֱ����������û�в��ã��϶�����ԭ��ġ�������Щ��ֱ������Ҳ���ĸ������ģ�������ˣ������п�����˫�ŵ���ת��������������������Ķ������� |
|
������ͻ�������������Խ���� ȼ�ͻ�������ʵ�ֵ��������̬���� |
|
����Ϊ��Щ���������������ȶ���UAV�����ᴫͳֱ����/����ֱ������˫����ת�����������Ѿ������Ž��ˣ������ڵ���Щ���̽���������û�������Ч��������ˡ� ����/���᱾������һ�ּ������ݾ�������һ�ֶ���Դ�Ͳ��ϵļ����˷ѣ�Ҳ��DJI��ը����Ϊʲô�ߵ�����ԭ����flight computer �����ⲻ�ϲ�record�Լ���hardware failure����fail���flight data recorder ��û���Լ��û�����ȫ�� access�� backup������Ϊ�����û�Ϊ���ֲ��ɿ��Ķ����ึǮ�� �ټ��ϣ�DJI ʵ������һ�������Ե� against rights to repair ����ҵ�����������û��������������������Ƕ��û��IJ������Ρ� ͬ���ģ���DJI����ĺ��ֻ�һ���Ķ�sensor & Fixed Lens����������͵���ļ����ݾ������������ɶȻ��ǿ��öȶ����㼼���ϵ����Ž�����������������Ž⡣ |

|
|
|
|
|
| [�ղر���] �����ر��ġ� |
| ���� �������� |
| ��Ϊ�ոշ������»���Ϊ���� 80 ���������� |
| ������ֻ����33����ƬͻȻ��ʼ�����㣬�� |
| ��ο�����ҫ GT Pro �۸� 3699 Ԫ�𣿶��� |
| Ϊʲô CCD �����������Ӱ�ռ��Ľ���ͻȻ�� |
| ����ͬ����Ʒ��ͬ�ֻ� 3 �ּ۸ͷ��Ʋ�ͬ |
| ��ο���Ӣΰ�ﱻ��δ������24GB�� RTX 508 |
| Ϊʲô���ڼ������ĵ����ôС������Щ�� |
| Ϊʲô֪������Ȱ�˼�������� |
| ��ο���С�����ڻ�Ӧ��������iPhone�ǻ��� |
| ��ѧ������Ԥ�ƹ����µ��ԣ���û�и�����ȫ |
| ��һƪ���� �鿴�������� |
|
|
|
|
��������:
��ӰƱ��
����Ȧ
����
����
����
�����
ӡ��
�ɼ�
��س
����
��ˮ
��Ǯ�ҽ���ר��
����
˫ɫ��
����ĸ��
����
ƹ����
�й�Ů��
����
nba
�г�
�ܲ�
����
���
��ɫ
�Ϻ��п�
80��
����: ���� �����ֶ� ������ķ�ȴ� �ʼ������� ����ͼ˹ ���� ����� ���� �ﰺ ����ʥ�ն��� ���� |
| ��վ��ϵ: qq:121756557 email:121756557@qq.com ֪ʶ�� |